File:Cow-invknm-v1.png: Difference between revisions
Jump to navigation
Jump to search
No edit summary |
(No difference)
|
{kind=link}
{kind=link}
Latest revision as of 18:46, 11 August 2019
Verifying the inverse kinematics against the GeoGebra model, we can see how the angles get set (q1 and q2), as well as the actuator lengths (blue lines) to place the end of the arm (point H) at a certain location.
File history
Click on a date/time to view the file as it appeared at that time.
| Date/Time | Thumbnail | Dimensions | User | Comment | |
|---|---|---|---|---|---|
| current | 18:46, 11 August 2019 | 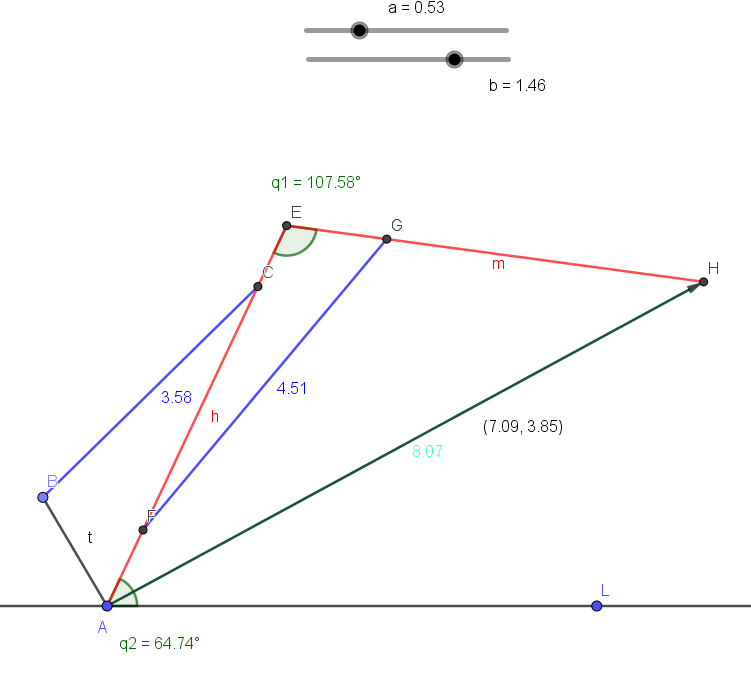 | 751 × 675 (32 KB) | Alnwlsn (talk | contribs) |
You cannot overwrite this file.
File usage
The following page uses this file:
{kind=link}